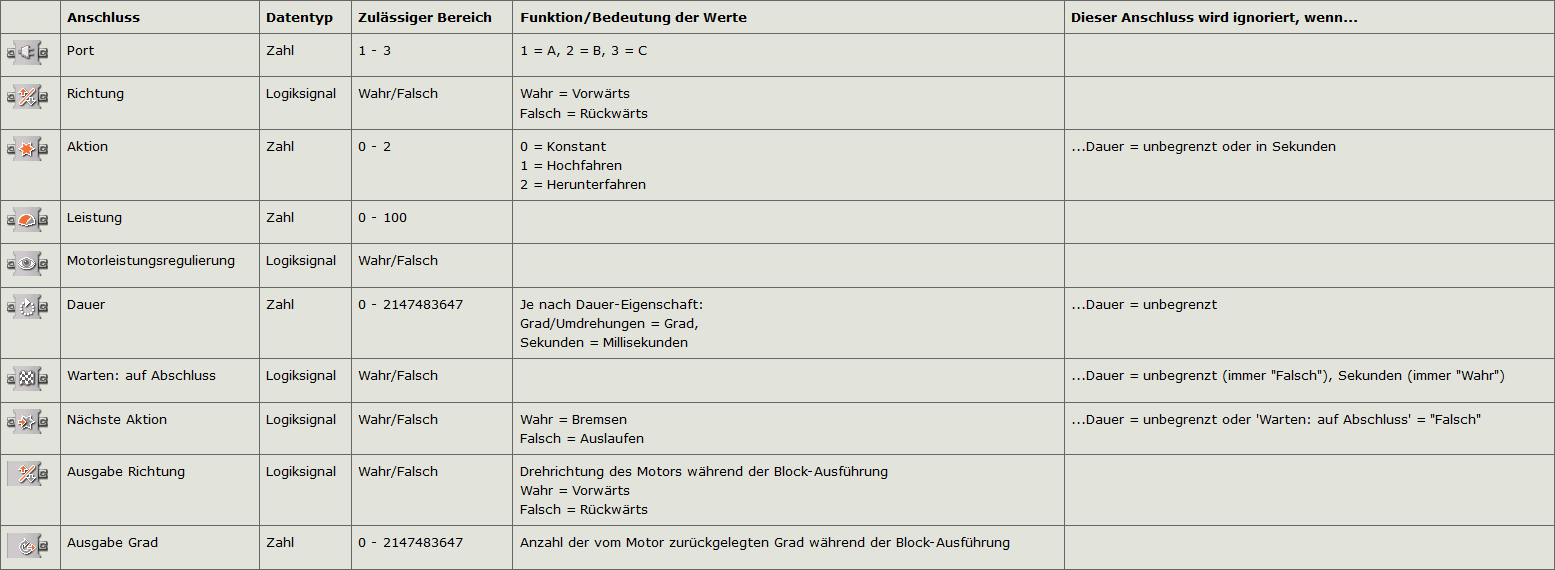
Beschreibung #
Der Motor-Block ähnelt dem Bewegung-Block, hat aber eine andere Funktion. Der Bewegung-Block dient zur Fortbewegung des Roboters durch Motor-B und Motor-C, während der Motorblock zur Verwendung von Motor-A vorgesehen ist. Anders als der Bewegung-Block ermöglicht er mehr Kontrolle über den Motor mit Zusatzoptionen unter Aktion: und Steuerung:.
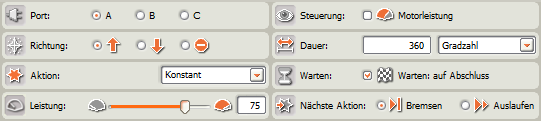
Funktionen #
Port: #

Unter Port: kann zwischen den Motoren A, B und C gewählt werden. Motor A, B und C entsprechen den Anschlüssen A, B und C am Roboter. Es kann immer nur 1 Motor ausgewählt werden.
Richtung: #

Unter Richtung: kann zwischen 3 Optionen gewählt werden.
Pfeil nach oben bewegt die motoren im Uhrzeigersin. Der Roboter fährt vorwärts.
Pfeil nach unten bewegt die motoren gegen den Uhrzeigersin. Der Roboter fährt rückwärts.
Stoppschild beendet die Bewegung der ausgewählten Motoren. Häufig benutzt um auf unbegrenzt eingestellte Motoren anzuhalten.
Aktion: #

Aktion: ist nur verfügbar, wenn unter Dauer: nicht unbegrenzt ausgewählt ist. Aktion: gibt drei Optionen, welche den Bewegungsfluss der Motoren verändert.
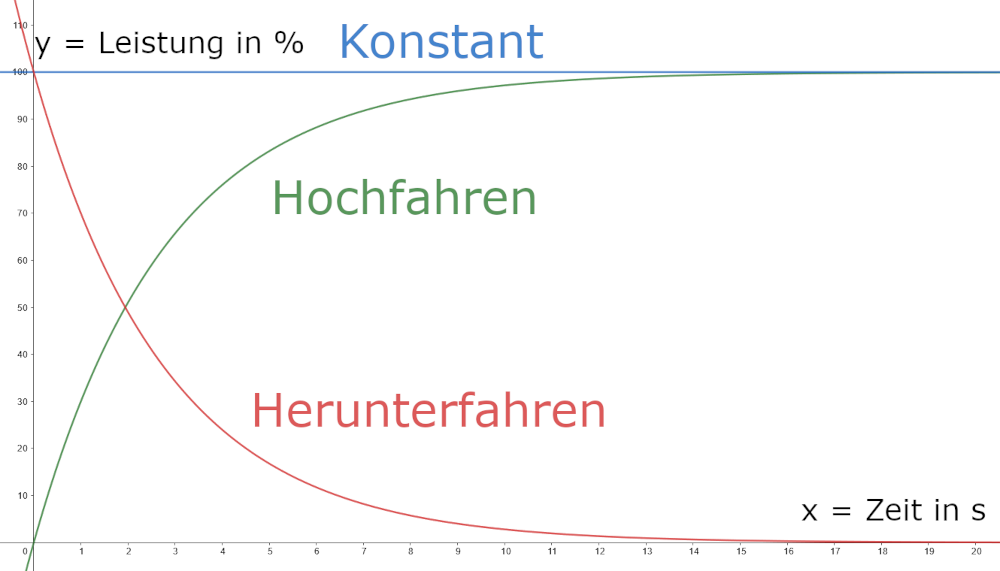
Konstant ändert die Geschwindigkeit nicht. Die Motoren verhalten sich wie beim Bewegungs-Block auch.
Hochfahren lässt den Motor erst langsam starten und wird immer Schneller.
Herunterfahren lässt den Moter erst schnell starten und wird immer langsamer.
In diesem Beispiel ist Leistung: = 100% und Dauer: = 20 Sekunden. (Dies ist nur ein Model. Ich hab die tatsächliche Beschleunigung noch nicht herausgefunden)
Leistung: #

Unter Leistung: kann die Geschwindigkeit des Motors eingestellt werden. Die Leistung: kann entweder durch das Eingabefeld oder mit dem Regler verändert werden. Die Leistung ist ein theoretischer Wert von 0 bis 100 %.
Steuerung: #

(In Arbeit)
Dauer: #
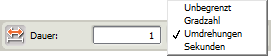
Unter Dauer: kann zwischen Unbegrenzt, Gradzahl, Umdrehung und Sekunden gewählt werden. Alle dieser Option bestimmen die Dauer für die sich der Motor bewegt.
Unbegrenzt dreht den Motor bis ein Motor-Block oder Bewegung-Block den Motor überschreiben oder durch Richtung: Stopp stoppen.
Gradzahl dreht den Motor um die angegebene Gradzahl. Dabei entsprechen 360° einer Umdrehung. (Praktisch wenn man sehr genaue kleine Motorbewegungen braucht)
Umdrehungen dreht den Motor um die Anzahl der angegeben Umdrehungen. Eine Umdrehung sind 360°.
Sekunden dreht den Motor für die angegebene Dauer der in Sekunden.
Nächste Aktion: #

Unter Nächste Aktion: bestimmt, wie der Roboter anhält, wenn die Dauer: vorbei ist. Es gibt 2 Optionen Bremsen und Auslaufen.
Bremsen stoppt den Motor aktiv und sorgt für einen aprupten stopp.
Auslaufen stoppt den Motor nicht. Der Motor kann sich weiter drehen bis er von alleine stoppt.
Input / Output #