Beschreibung #
Wenn der Warten-Block ausgeführt wird, stoppt das Programm bis der ausgewählte Sensor ein positiven Logiksignal ausgibt oder die Zeit abläuft. Dieser Block kann benutzt werden damit der Roboter Pausen zwischen Aufgaben einlegt. Zum Beispiel könnte der Roboter 100 Meter fahren und dann warten bis ein Knopf gedrückt wird und dann eine Kurve machen (Langweiliges Beispiel). Alternativ kann man ihn auch in einer Schleife benutzen um eine Zeitverzögerung einzubauen.
Funktionen #
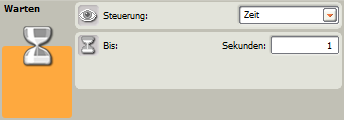
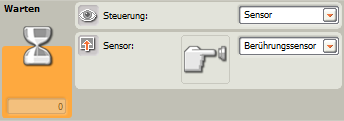
Steuerung: #

Unter Steuerung: kann zwischen Sensor und Zeit gewählt werden.
Sensor #

Ist Sensor ausgewählt kann zwischen einem der 12 Sensor-Blöcke gewählt werden. Der Wartenblock hört auf das Programm zu stoppen, wenn der Sensor ein positives Logiksignal ausgibt.
Bis #
Ist Zeit ausgewählt wird das Programm für die Anzahl an Sekunden im Eingabefeld gestoppt. Alle Dezimalzahlen werden aktzeptiert bis 0,001.